This project involved designing and developing a bioinstrument that triggers motor movement in response to a person’s heartbeat. The system processes ECG signals and converts them into motor actuation, creating a visual representation of cardiac activity through moving elements in a fish tank.
School: Purdue University - Indianapolis
Location: Indianapolis, IN
Duration: March 2023 - May 2023
Project Gallery
Github Link: https://github.com/ncknight-un/BioSense-Motor-Activation
Biosense Fishtank:
Fish Tank Setup

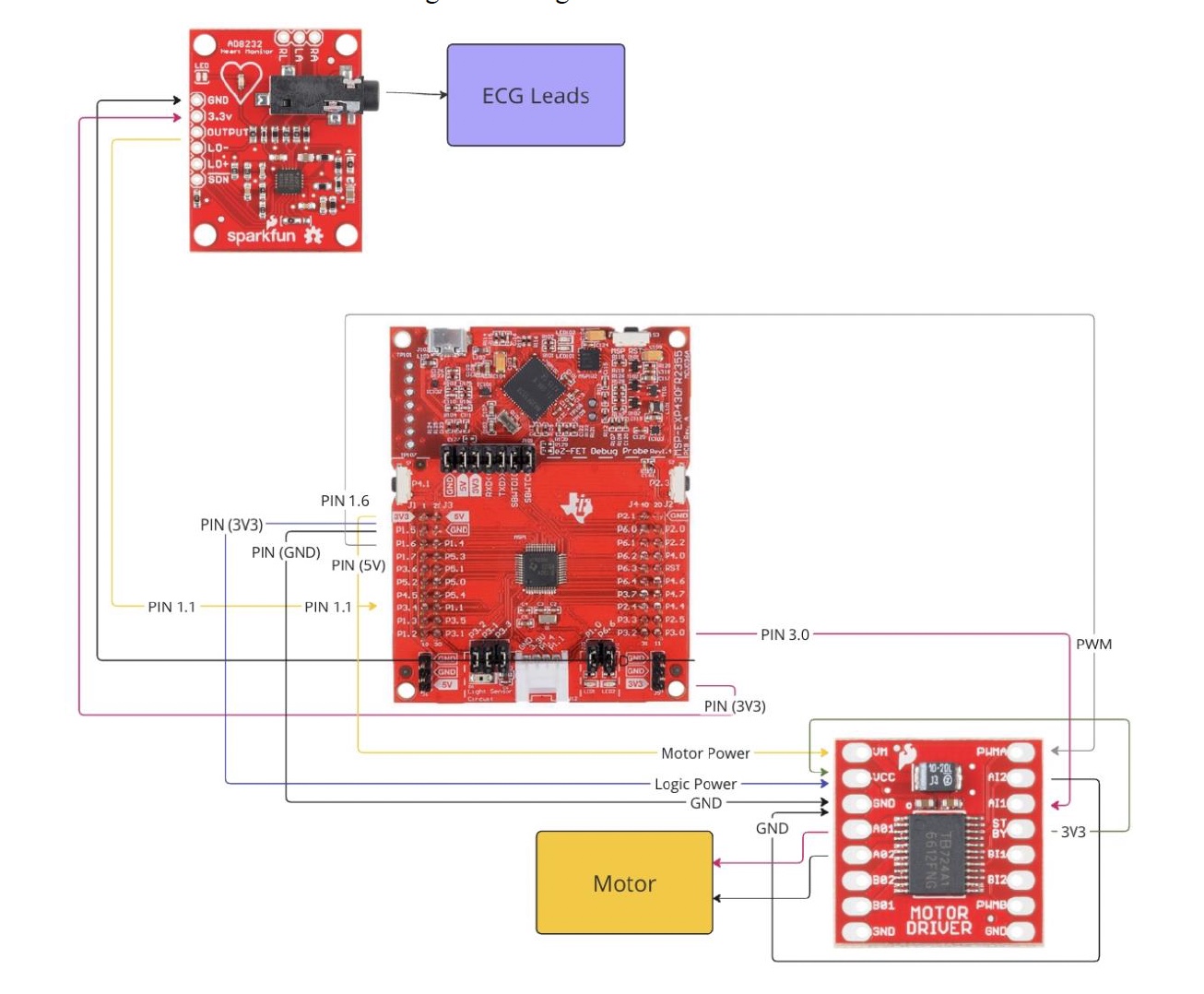
Hardware Achitecture
Artificial Heart Device

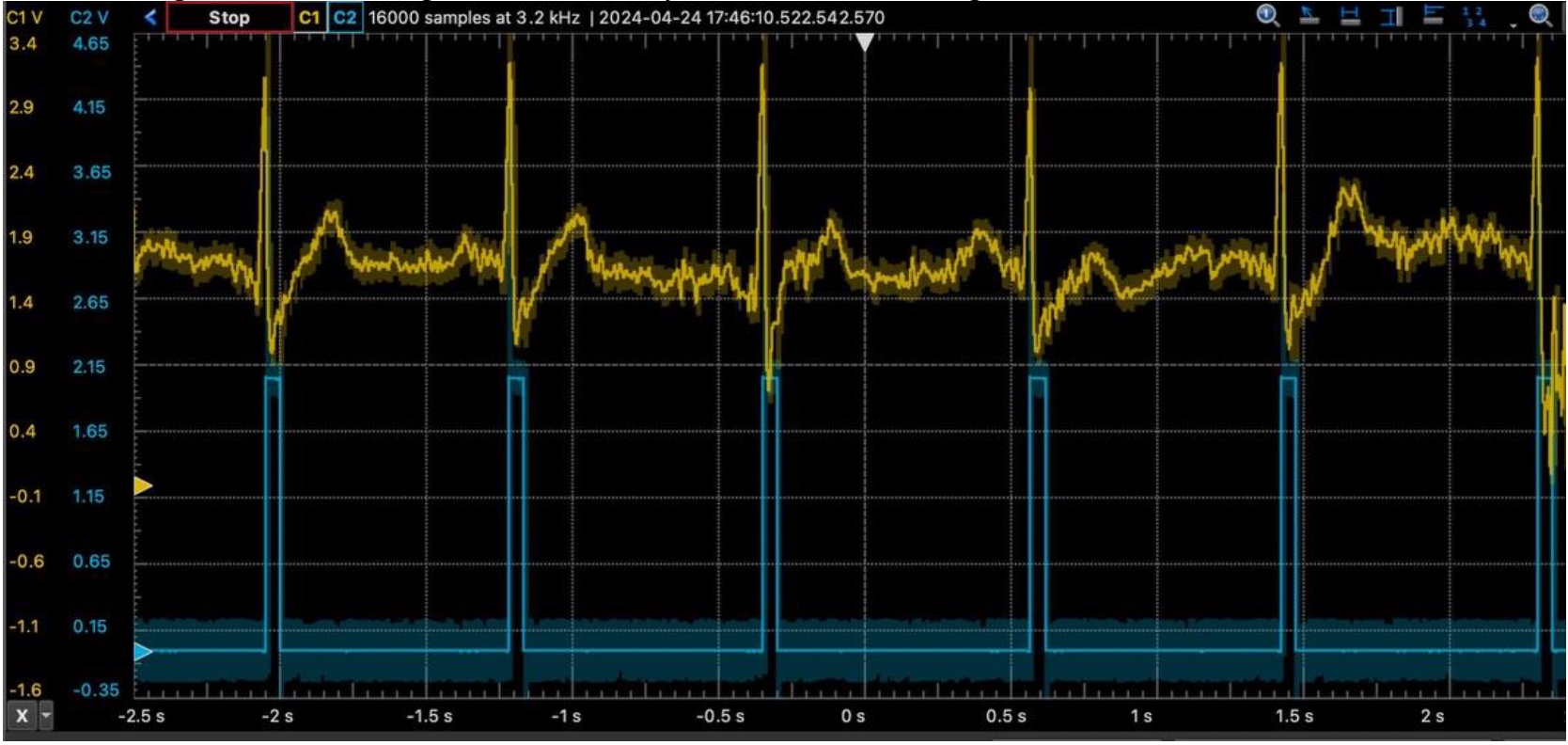
Activation Oscilloscope
System Architecture
The device integrates multiple hardware components:
- Microcontroller: MSP430-FR2355
- Sensor: ECG module
- Motor Driver: TB6612FNG
These components work together to process biological signals and control motor behavior.
Signal Processing & Control
- The MSP430 acts as the central processor, converting analog ECG signals into digital outputs
- A heartbeat is detected based on the QRS complex of the ECG signal
- An LED flashes to visually confirm heartbeat detection
Motor Control
- The motor driver receives signals from the microcontroller
- PWM signals control motor speed
- Standby input enables or disables motor operation
- AI1 and AI2 pins control direction using an H-bridge mechanism
Testing & Demonstration
- An artificial heart signal (Fluke PS410) was used to streamline testing
- The ECG signal is processed in real time
- A square wave signal at the QRS peak triggers motor activation
Skills Improved
- Embedded systems design and integration
- ADC for biosignal (ECG) processing
- Biomedical sensor interfacing
- Motor control (TB6612FNG, H-bridge, PWM)
- C programming for embedded systems
Key Takeaway
This project provided hands-on experience integrating biological signals with embedded systems by converting ECG data into real-time motor control. It reinforced the role of microcontrollers in sensing, signal processing, and actuation.
Working on this system strengthened my understanding of motor control (PWM speed regulation and H-bridge direction control) and highlighted the challenges of hardware–software co-design in timing-sensitive applications. It also improved my ability to write low-level C code, debug embedded systems, and interpret hardware datasheets for system integration.