During my contract work for GM Diecron, I gained practical experience in automation-focused manufacturing projects within the aerospace industry. I assisted in designing floor plans and machine hardware that enabled the integration of collaborative robots to improve efficiency and reduce manual labor.
Company: GM Diecron
Role: Automated Manufacturing - CAD (Contract)
Location: Remote, USA
Duration: May 2025 - August 2025
Project Gallery
Please note, any part numbers or product identification has been redacted. Media usage has been approved by GM Diecron INC.
Automation Production Cell #1
This project involved designing and optimizing an automated production cell for aerospace components. Deliverables included floorplans, tooling images, and a demonstration video of a mill fixture I designed.
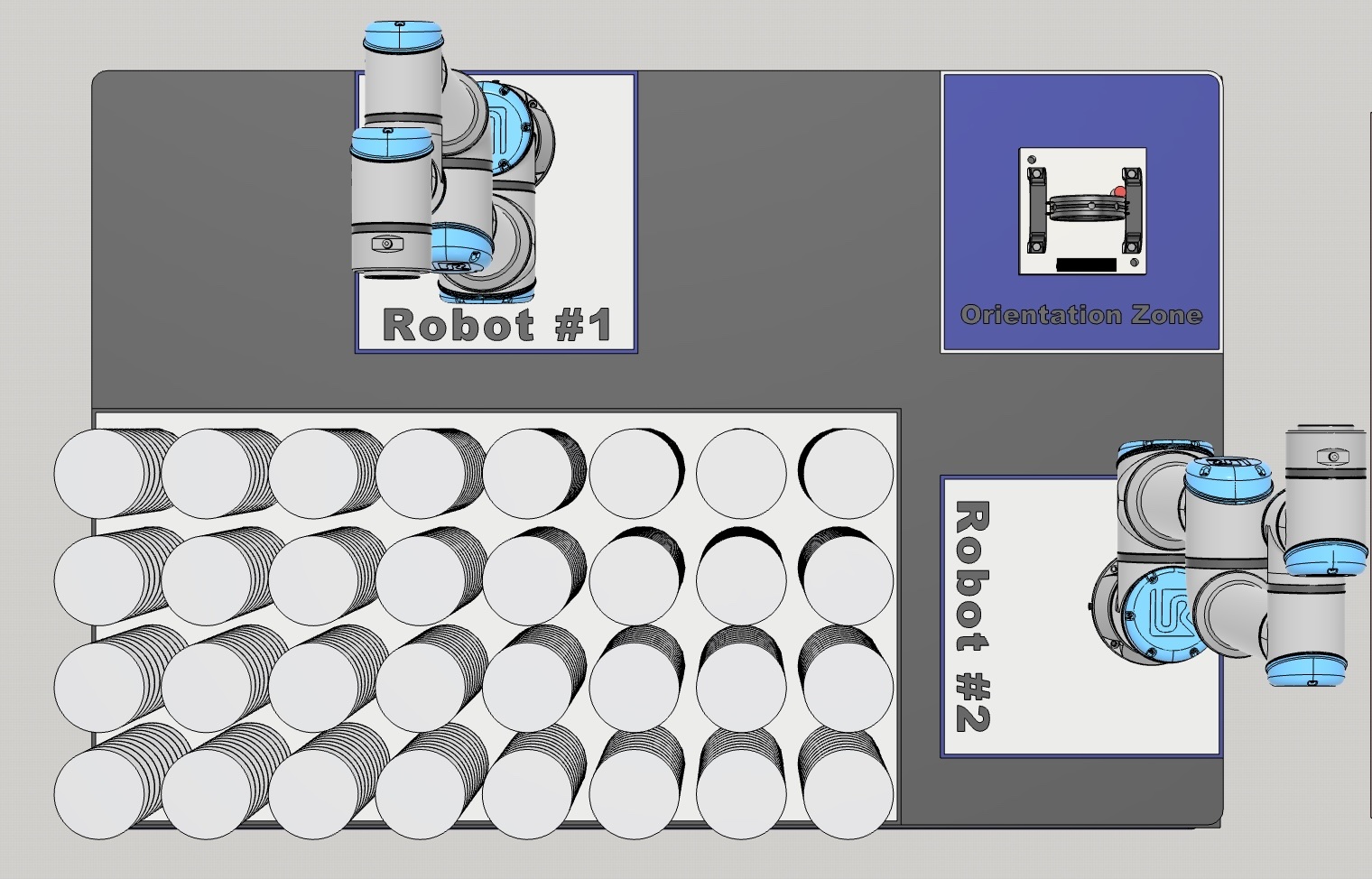
The scope included designing a layout within facility constraints to accommodate all required equipment. I created a custom table to enable two collaborative robots (cobots) to interact with individual machines within the cell. The table featured a system of pucks for parts, which could be loaded by a machinist. The first cobot would place parts into a lathe, after which they would move to an orientation zone adaptable to different part sizes.
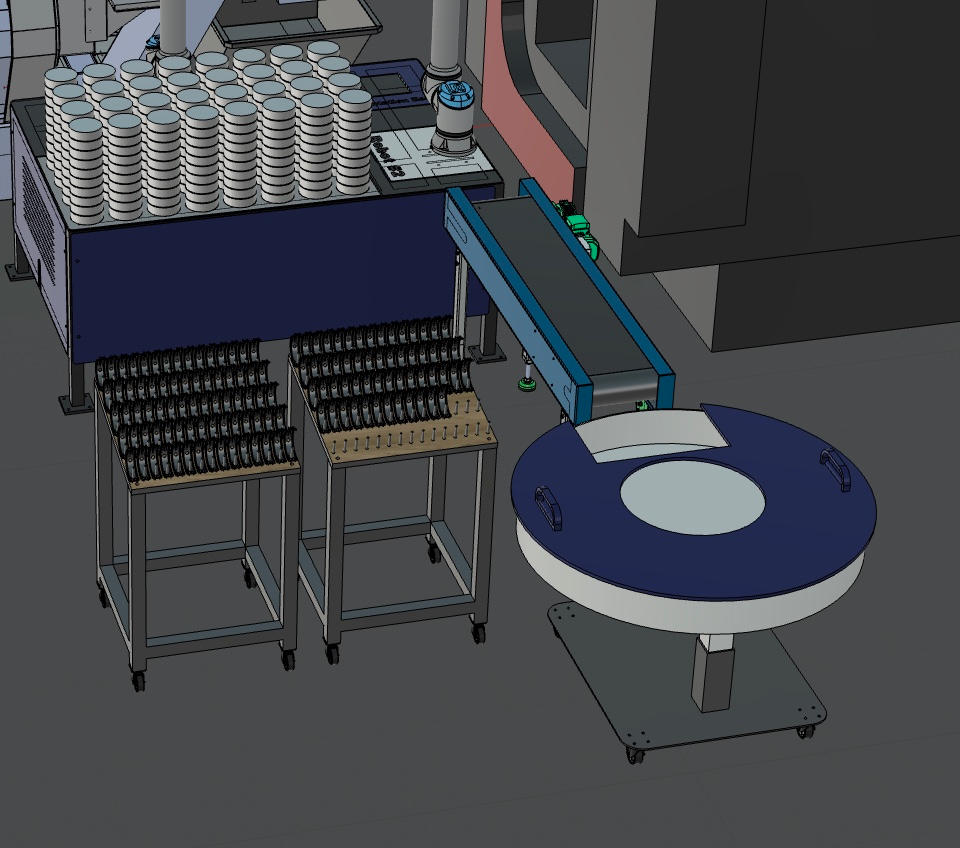
The second cobot would then place the oriented parts into the mill fixture (demonstrated in the video), where they were clamped for milling. After milling, parts were transferred to a conveyor belt and collected in tubs.
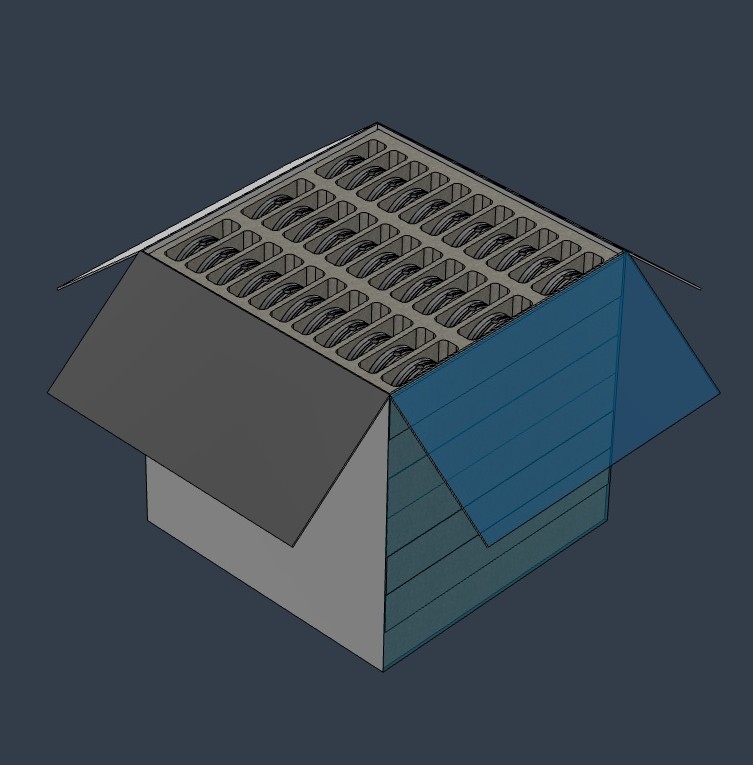
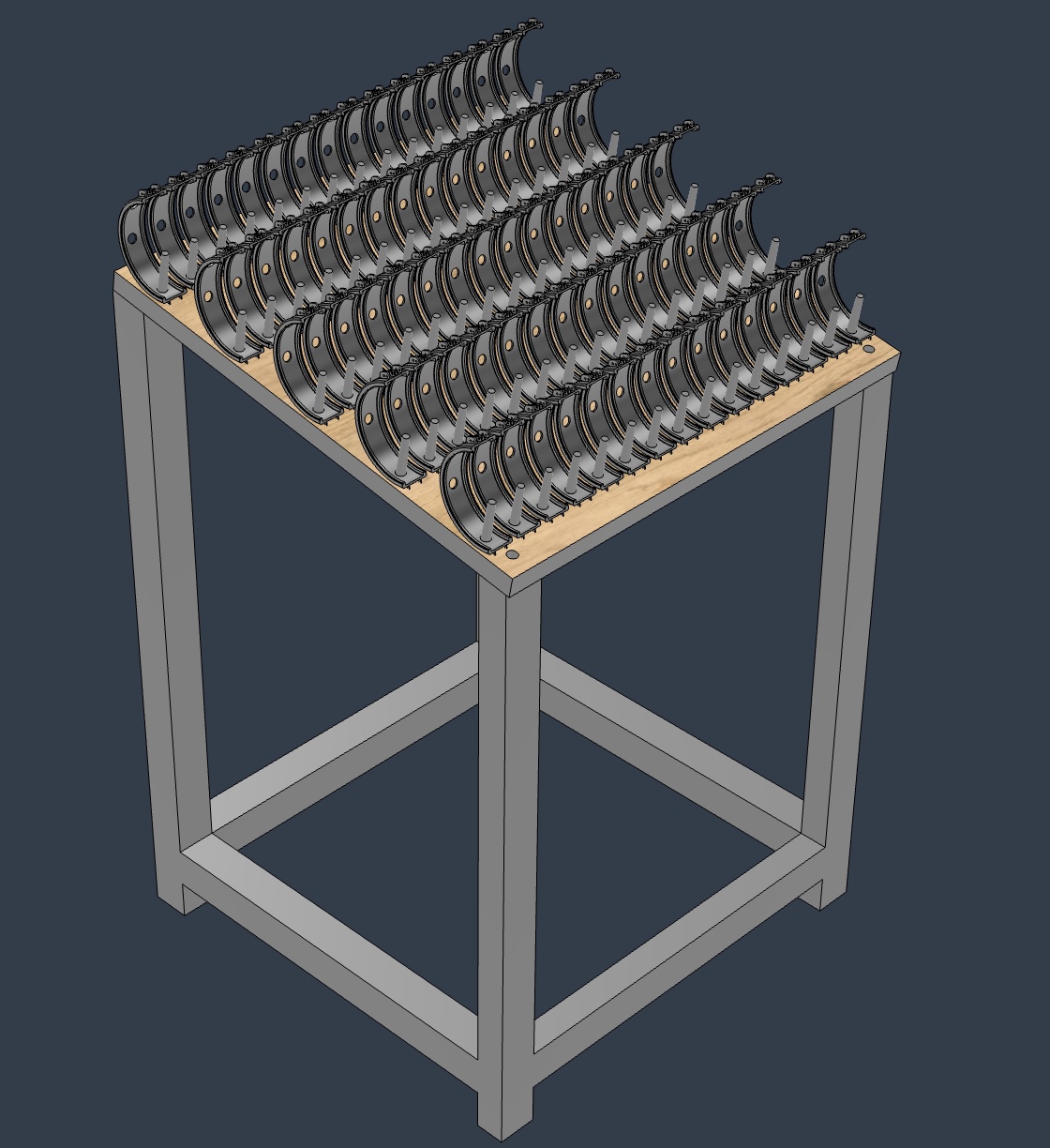
For post-production, I designed specialized part carts and custom foam inserts to protect components during movement and shipping. The packing layout was optimized to fit standard-sized shipping containers.
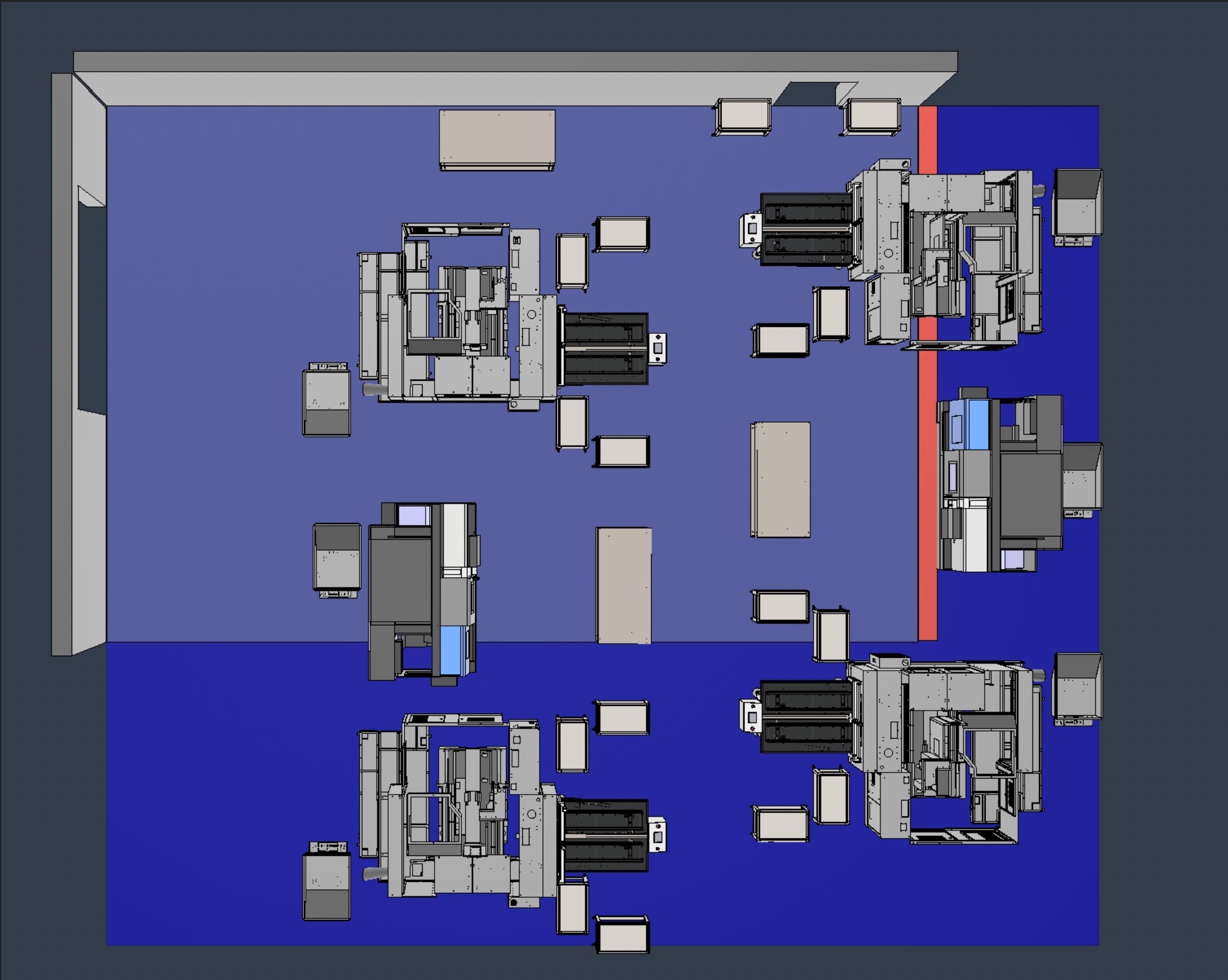
Production Cell Floorplan
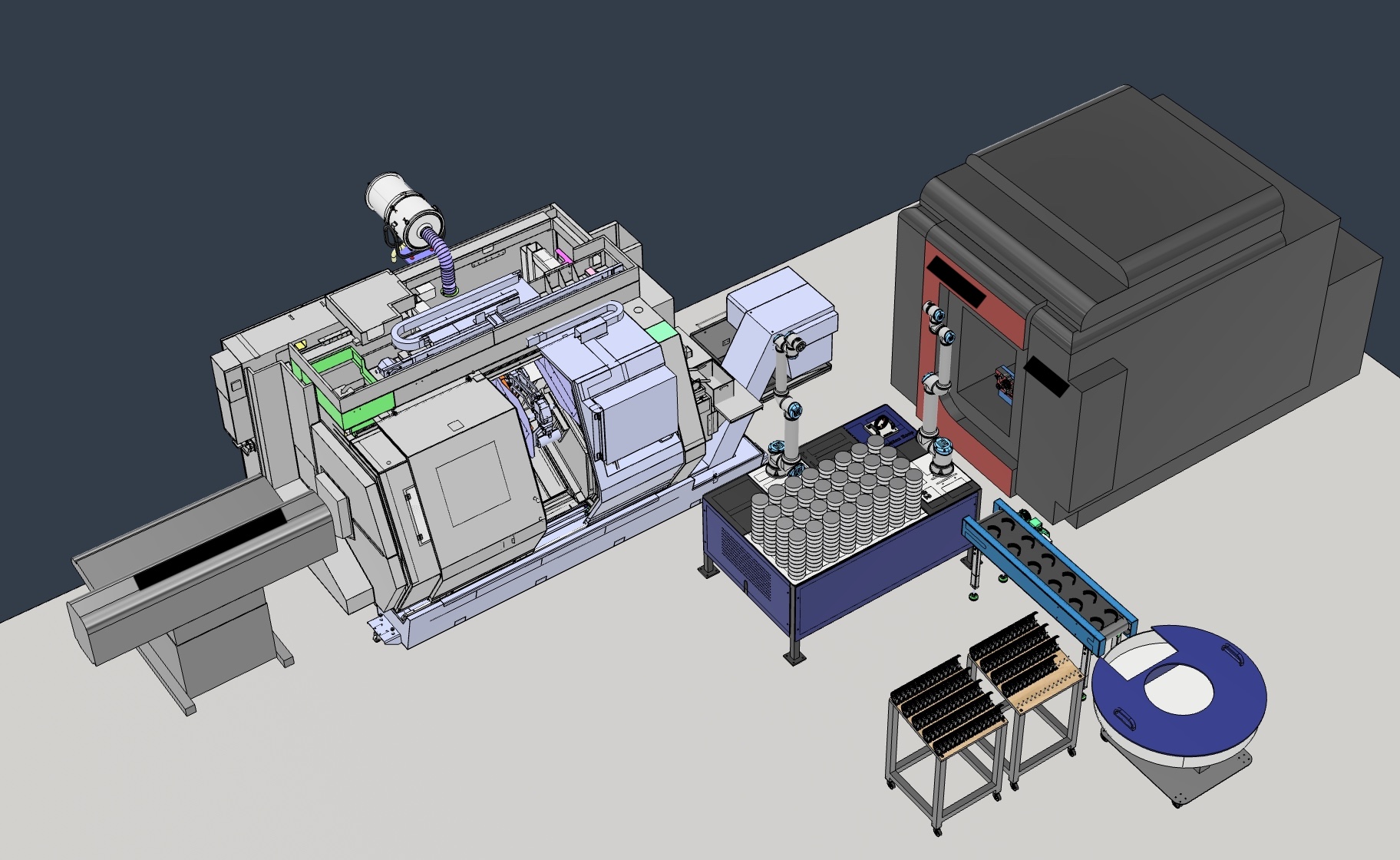
Table Fixture Design
End-of-Line Floorplan
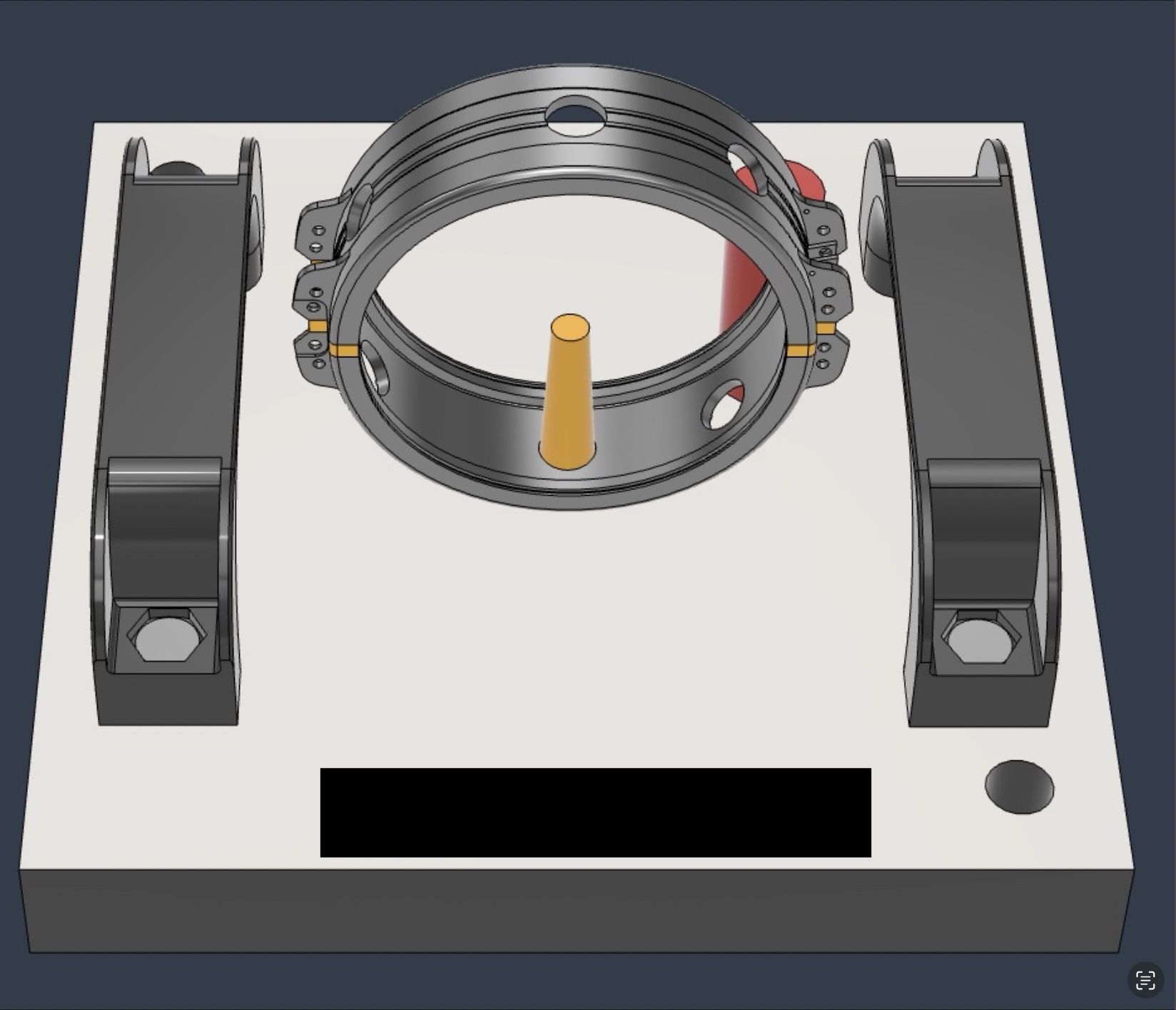
Orientation Stage
Product Packaging
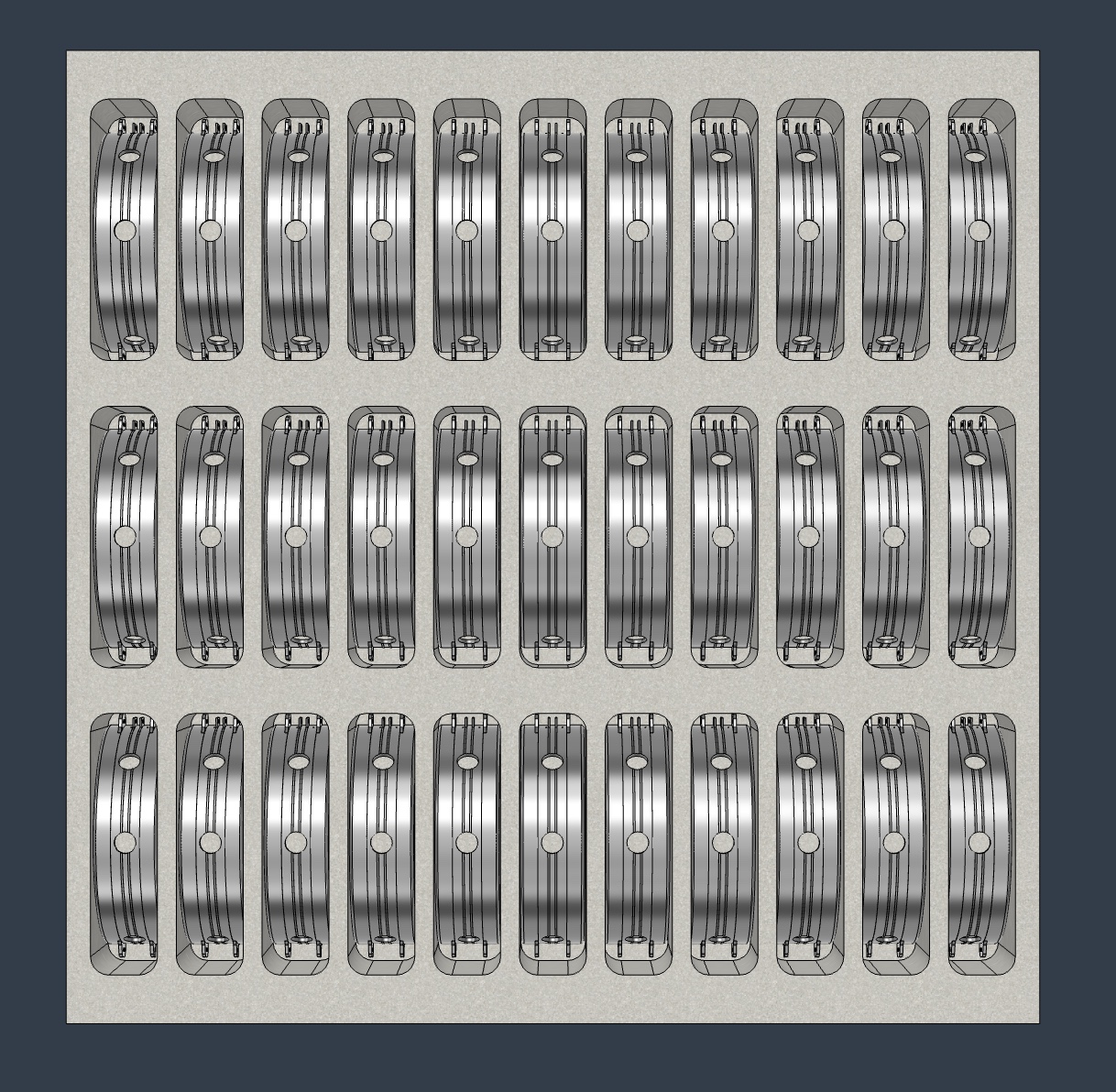
Product Shipping
Part Cart
Mill Fixture Demo
Automation Production Cell #2:
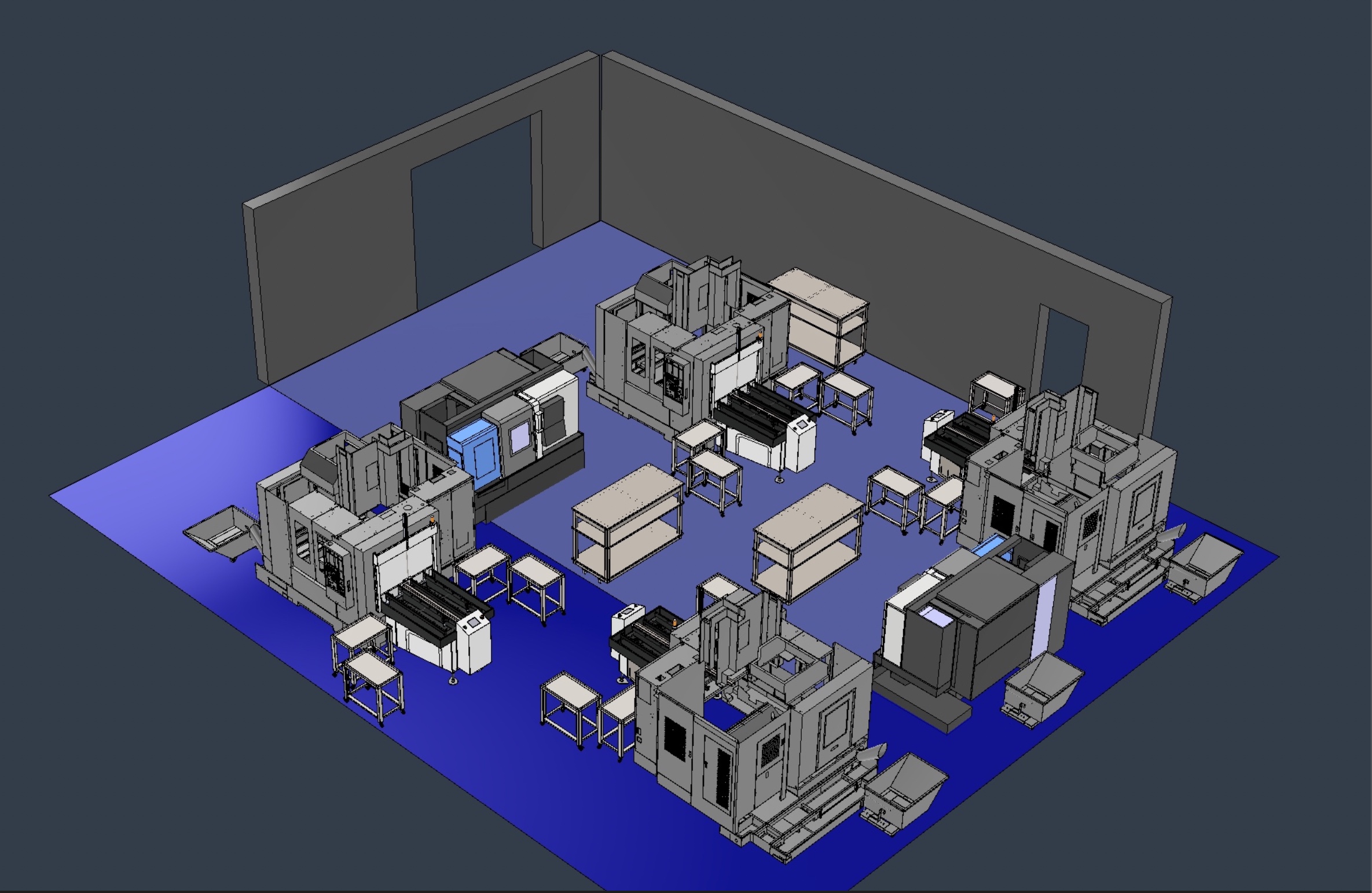
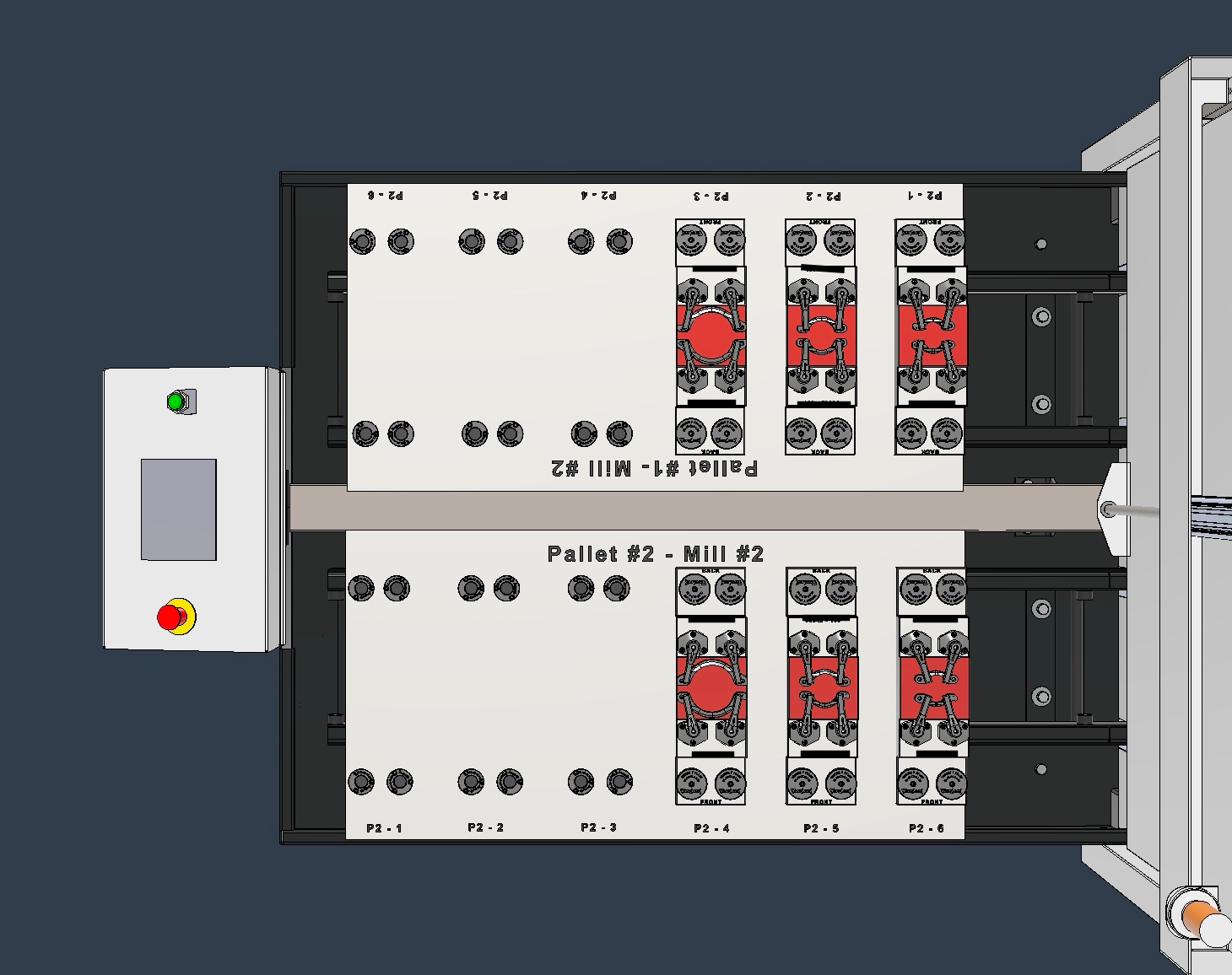
This project focused on designing a large-scale automation pipeline, with the primary deliverable being a generalized floorplan optimized for tight warehouse spacing. These spatial constraints influenced machine selection, layout, and the overall order of operations within the manufacturing process.
The goal of the project was to reduce the level of direct machinist involvement in the production of multiple part types. The final design incorporated automated loaders for each milling machine, while lathes remained manually operated. Interchangeable pallets were developed for use across machines, allowing different M-codes to be loaded based on the active production run. This flexibility enabled higher output of specific part sizes when needed, simplified machine maintenance and changeovers, and allowed the system to continue operating even if an individual pallet station experienced issues.
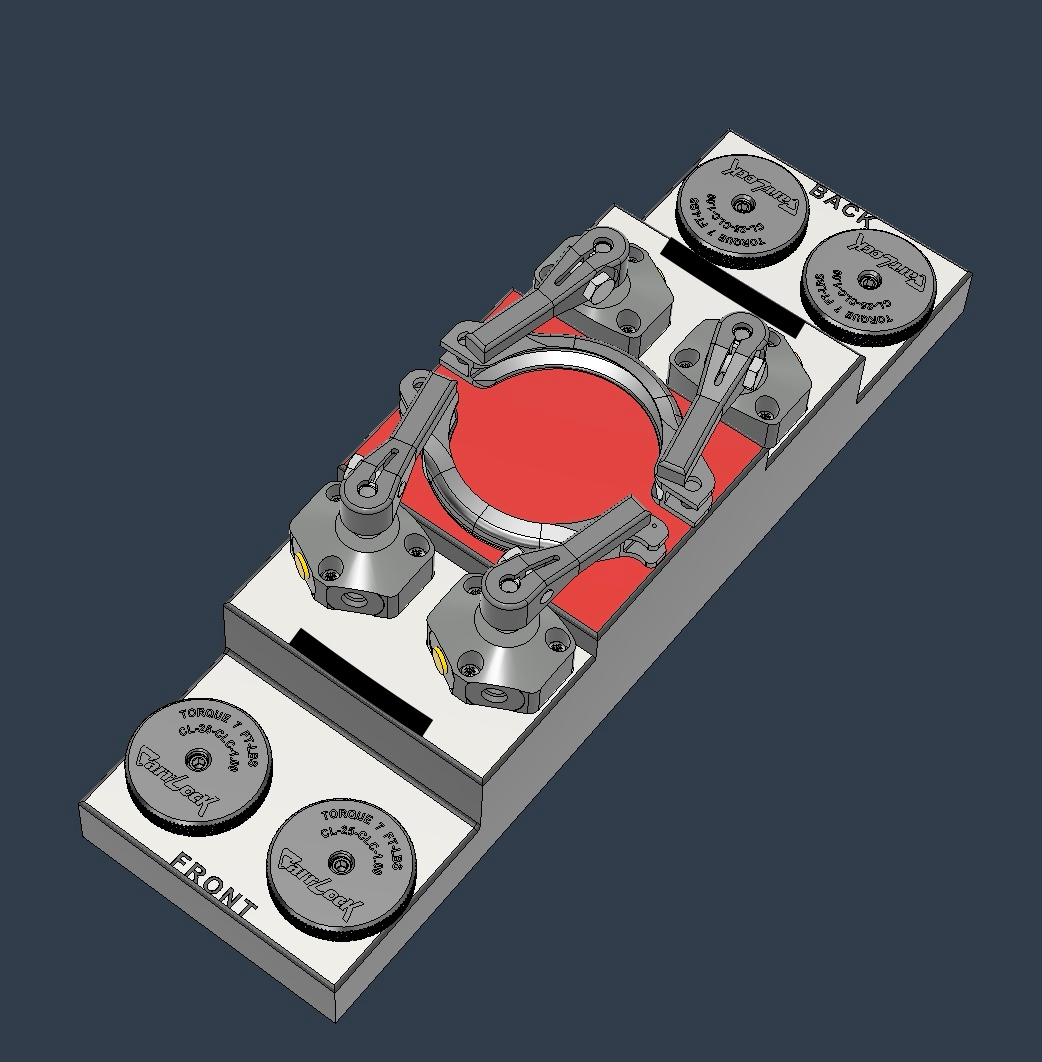
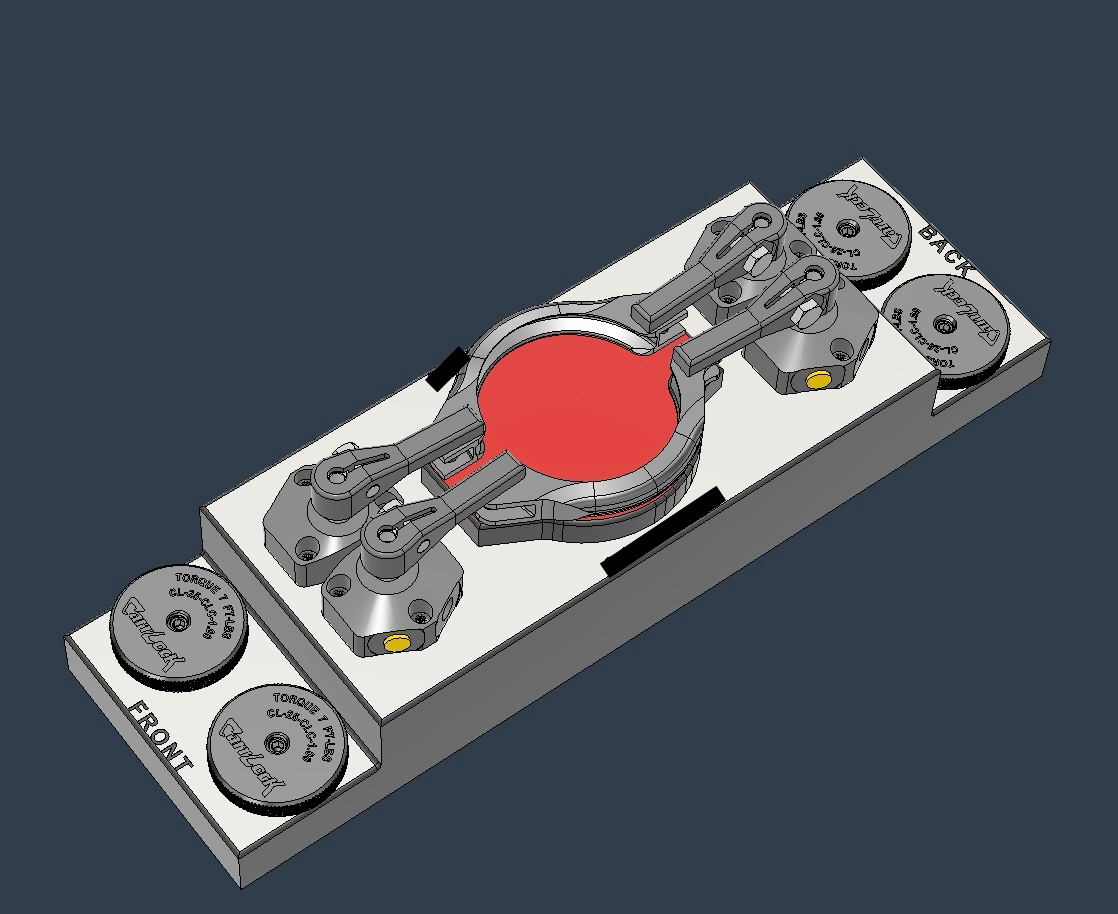
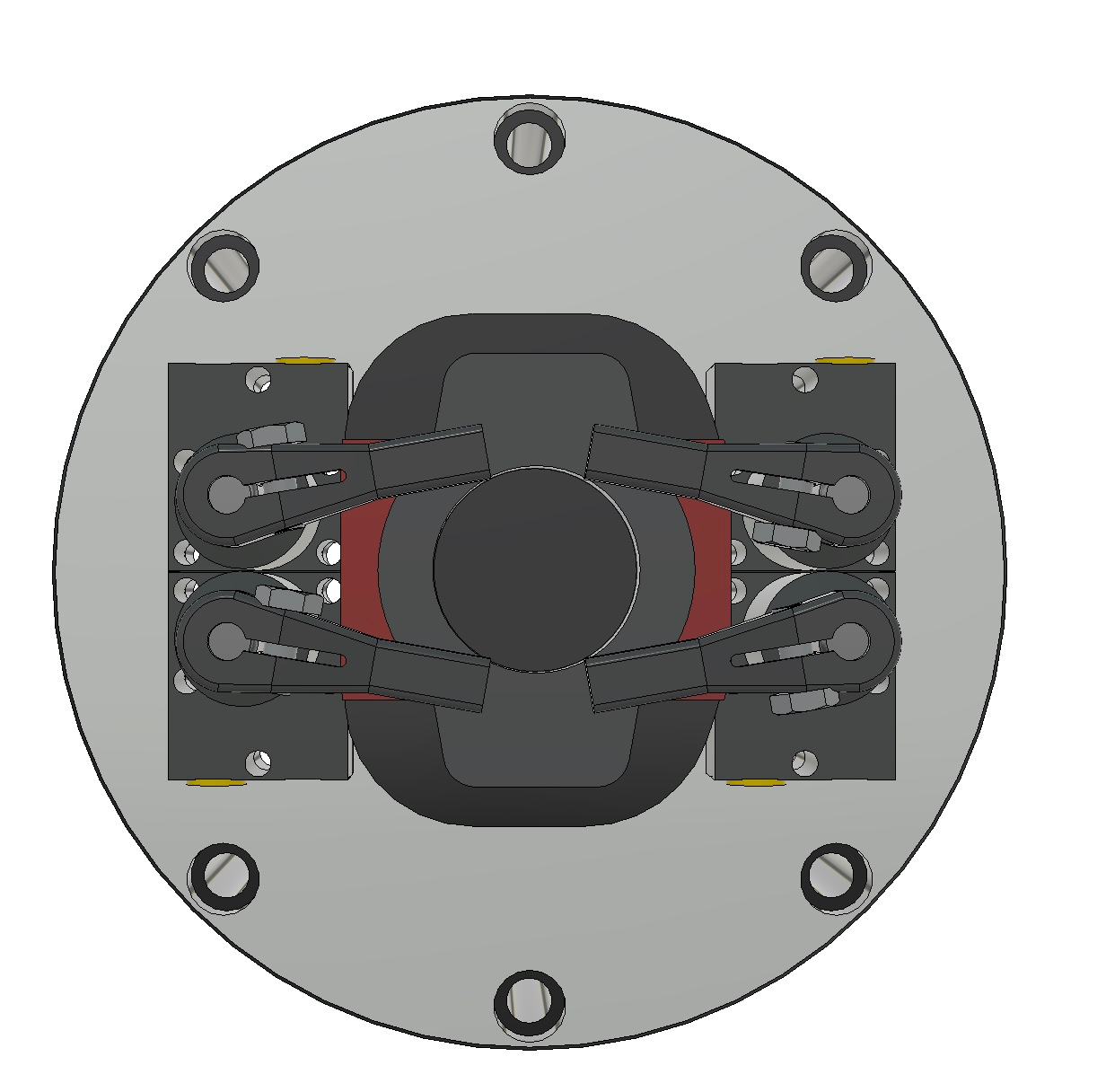
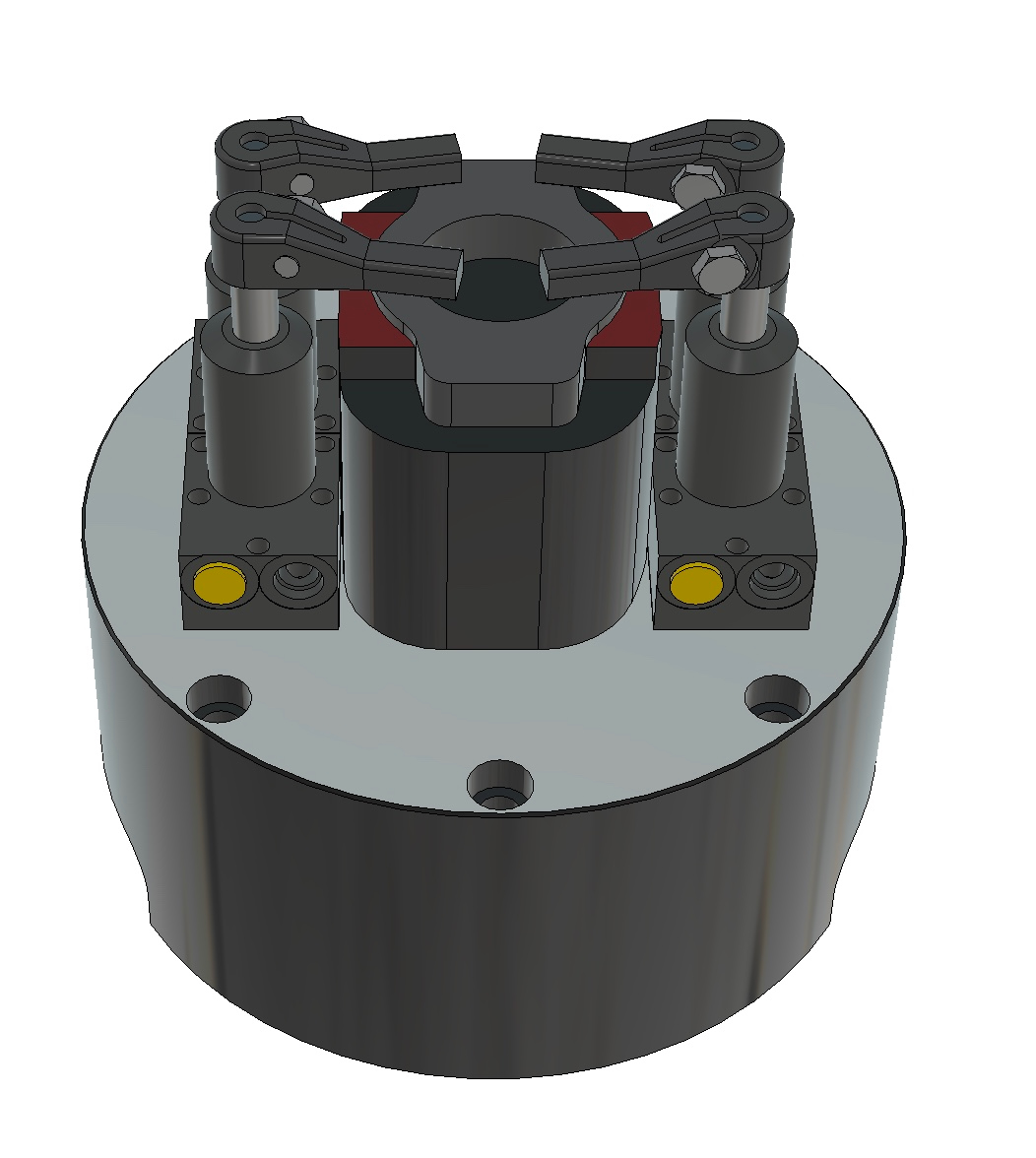
I designed both the lathe and mill fixtures with size-specific mounting plates that could be pinned into the automated loading plates. Hydraulic clamps on each fixture secure the parts in place once a machinist positions them according to the locating pins. This system streamlines the clamping process and supports automation while ensuring precise part placement for machining.
Production Cell Floorplan
Floorplan - Side View
Mill Fixture Design 1
Mill Fixture Design 2
Lathe Fixture Design - Top View
Lathe Fixture Design - Side View
Pallete Loader #1
Pallete Loader #2

Main Responsibilities:
- Designed and modified CAD models for manufacturing of aerospace devices.
- Designed floorplans, supporting hardware, and layouts of production cells.
- Collaborated with lead engineers and technicians to plan automation processes.
Skills Improved:
- Automation & manufacturing principles
- CAD modeling and technical drawings expertise
- Engineering communication and teamwork in a manufacturing setting
- Problem-solving in an automation production environment
Key Takeaway:
This experience allowed me to develop a strong understanding of how automation continues to advance within the manufacturing industry. I thoroughly enjoyed contributing to multiple projects at GM Diecron, where our goal was to develop layouts and proposals for manufacturing within the aerospace industry. I was brought on as a contract intern on short notice to assist with designing factory floor plans and machine hardware that supported the use of collaborative robots (cobots) to automate manufacturing processes and reduce reliance on full-time labor on the plant floor.
This role also provided me with valuable hands-on experience in an industrial environment that I had not yet encountered through my academic coursework. Since completing this internship, I have received certifications in milling and lathe operation, which I hope to apply in future robotics and automation projects.